桃園市新屋區永安漁港深夜人車稀少,易有改裝車聚集競駛且噪音擾人,造成民眾反感,甚至危害用路人生命財產安全,為遏止飆車歪風,楊梅警分局去年12月31日晚間8時至翌日2時跨年夜強力執法,配合環保局執行配合環保局執行「取締改裝噪音車輛」聯合稽查,一輛機車經檢測超過1百分貝遭罰。
楊梅分局表示,共有6組路檢及6組機巡強勢警力規畫口袋攔截圍捕,完全封鎖永安漁港出入口及周邊道路,有效遏制,另針對取締改裝噪音車輛,各路檢點攔查車輛60部,取締無照駕駛違規7件、闖紅燈5件等交通違規,取締改裝噪音車輛經環保局檢測19部,噪音超標汽車5部、機車8部,依噪音管制法共裁罰新台幣7萬5300元。
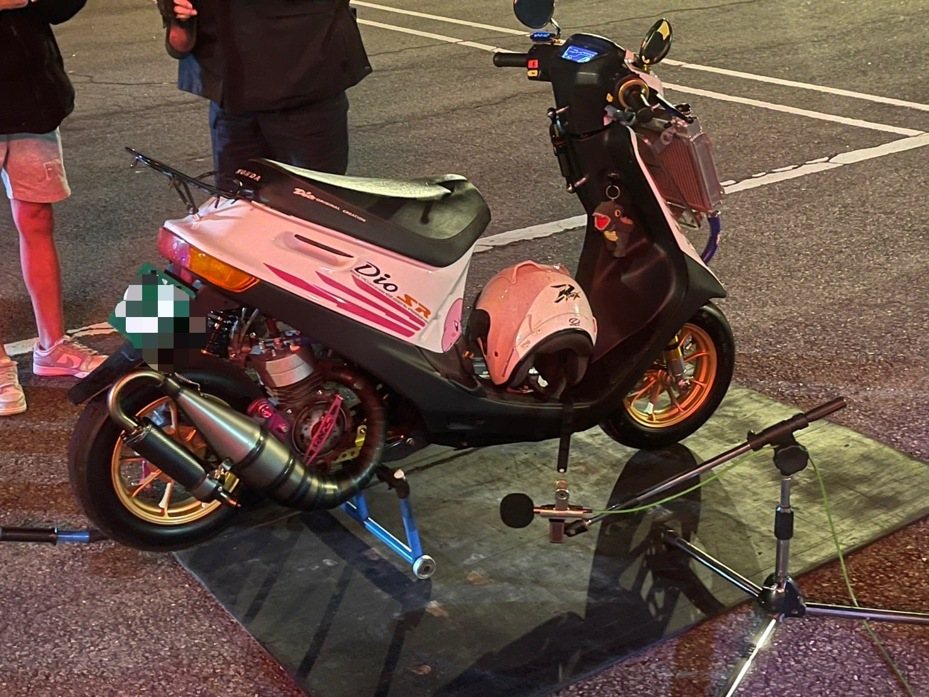
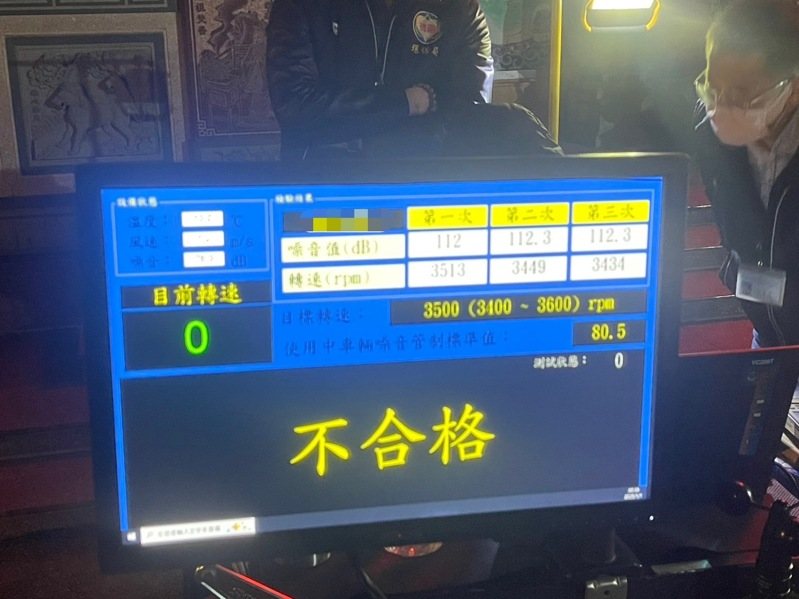
為因應今年1月起,機車排氣管改裝列入檢驗項目,凡未取得排氣管認證完成申報變更登記的車輛,經稽查發現後查證屬實,依道路交通處罰管理條例告發,若噪音超標不合格者再依噪音管制法開罰,楊梅警分局於今元旦首日1小時內即開出機車改裝非原型式排氣管而未依規定申報登記共5件,其中攔查2部曾在30餘年前風靡台灣的經典機車「Dio(三陽迪奧)」,經檢測噪音值均超過100分貝,最高達112.3分貝,嚴重超標31.8分貝。
楊梅分局長張仁傑表示,警方每周六日深夜0至6時,針對轄內易發生聚集及危險駕車路段,均有規畫防制危險駕車勤務,並不定時以口袋封鎖方式進行包夾攔截、圍捕,強力取締飆車族,並持續配合環保局以不定時、不定點聯合稽查路檢方式,加強取締改裝噪音車,也將持續結合路檢、巡邏等各項勤務,針對噪音車經常出入路段,加強攔查,轉報相權責機關裁罰,有效遏止改裝噪音車輛。
原文轉載來自:Source link